
Jetson百萬開發者故事 | 為了孩子的健康成長,他用NVIDIA Jetson做了一個象棋機器人
2022年年底,素為帶著這個項目,參加了NVIDIA舉辦的Jetson Edge AI開發者大賽,榮獲特別獎。
Jetson百萬開發者故事 | 通過Jetson NANO展現CV實踐價值
賈志剛便是其中一員,他的另外一個身份是 “OpenCV學堂” 的創辦人。同時,作為CSDN博客專家以及51CTO視頻學院認證講師,賈志剛在圖像特征提取匹配、識別等方面有較深入的研究,擁有10年以上圖像處理項目實踐經驗和教學經驗。
Jetson開發者破百萬,快來說出你的開發故事吧
現在,NVIDIA面向所有Jetson開發者發起有獎征集活動!說出您與Jetson的故事,無論是開發創造的經典案例,還是學習構建的心得體驗,都歡迎您暢所欲言。
正當時 NVIDIA Jetson Nano讓智能機器人開發易如反掌
NVIDIA Jetson是面向邊緣計算的人工智能平臺,適用于自主機器和其他嵌入式應用程序。而NVIDIA Jetson Nano是一款面向嵌入式和邊緣人工智能市場的低成本入門級人工智能計算機。
Orin開發套件04-安裝DeepStream
前面安裝Jetson Orin開發套件的開發環境過程,并沒有將DeepStream智能分析套件安裝進去,因此需要獨立的安裝過程,這里提供三種安裝方式給使用者參考。
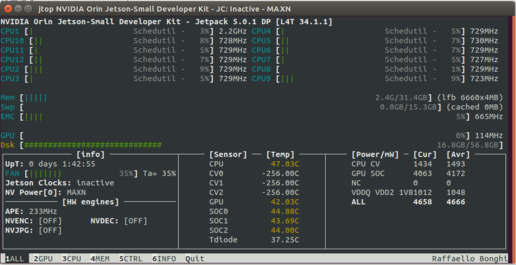
Jetson Orin開發套件03-安裝開發環境
過去的AGX Xavier開發套件是需要透過headless(USB線)方式與PC進行連線,然后在PC上執行SDK Manager為Jetson設備安裝開發環境,執行步驟相對繁瑣。
TAO系列12-將模型部署到Jetson設備
前面我們花了很多力氣在TAO上面訓練模型,其最終目的就是要部署到推理設備上發揮功能。除了將模型訓練過程進行非常大幅度的簡化,以及整合遷移學習等功能之外,TAO還有一個非常重要的任務,就是讓我們更輕松獲得TensorRT加速引擎。
TAO系列06-視覺類的數據格式
前面的系列文章里提過,TAO工具將模型訓練的絕大部分技術難題都進行抽象化處理,大幅度減輕開發人員的負擔,唯獨數據集的收集與整理仍須由人工自行處理,這幾乎是留個操作人員的最后工作了。
GTC22 | Jetson開發者日來了 快來點擊預約
NVIDIA Jetson開發者日是一個面向所有開發者開放的特別活動。現在免費注冊,您將看到Jetson平臺專家進行深入探討,通過多場講座展示自主機器和邊緣AI的最新創新。
Jetbot系列13-圖像回歸法實現循路功能
前一篇從Jetson Projects所挑選的“TRANSFER LEARNING WITH JETBOT & TRAFFIC CONES”項目,是延續避撞應用使用深度學習的圖像分類技術,讓Jetbot實現循路的功能,這種“定速”類型的操作基本上比較偏向于“找路”或“走迷宮”的應用。
Jetbot系列11-智能避障之模型訓練
Jetbot使用深度學習最基礎的圖像分類功能,模擬人類真實的視覺感知能力來實現避撞的應用,基本的原理在前一篇文章里已經詳細說明,原廠提供的best_model.pth模型文件所采用的數據集。
Jetbot系列12-圖像分類法實現找路功能
避撞功能是智能車的最基本保護能力,Jetbot使用深度學習的圖像分類技術來模擬人眼習慣實現這個功能,但這只是智能車所展現的最入門應用而已,接下去就要提升到“循路”的功能,跟著指定路線去前進,才是真正進入有實用價值的應用。
Jetbot系列10-智能避撞之現場演示
避撞功能是Jetbot一開始最令人矚目的功能,因為這是所有小車都必須具備的最基本“自我保護”的能力,而Jetbot沒有任何距離傳感,只憑著一個CSI攝像頭就能完成這項任務,對很多人來說是一件蠻神奇的事情。
Jetbot實戰系列08:組裝過程的注意細節
假如您的Jetbot小車是從外面采購第三方套件的話,可以跳過本文的內容。如果您是按照jetbot.org原廠的自行組裝方式,那么本文所提供的一些細節點,會讓您節省很多摸索的時間。
Jetbot實戰系列07:機電控制設備的安裝
機電控制是智能車最重要的輸出功能,假如您使用Jetbot官方的自行打印車體并用組裝方式來搭建智能小車的話,就需要搭配下圖這個 ”DC-Stepper-Motor” 控制板,因為3D打印車體是根據這個控制板所設計的。
Jetbot實戰系列06:I2C總線與PiOLED
在“Jetbot實戰系列05-Jetson的40針引腳”一文,已經將SFIO與GPIO之間的關系分析清楚,接下來就是帶著大家更深入了解I2C引腳與開發庫的使用,以及調整PiOLED顯示內容的方法。
Jetbot實戰系列05:Jetson的40針引腳
嵌入式設備有個天生賦予的重點任務,就是要成為自動控制整體方案中的一員。早期市場對自動控制的需求主要集中在單純的“機電控制”上,而具備智能計算的Jetson系列產品相對與幾十元的這類控制板來說,成本是高出一個階位。
Jetbot實戰系列03:無線WIFI的安裝與調試
無線網絡是操控無人車的必要設備,因為我們不可能讓無人車拖著一條網路線去進行操作。要為Jetson Nano(含2GB)裝上一片無線網卡是非常簡單的事情,但是最復雜的問題是“設置”的細節,必須兼顧更多可能的使用場景。
